


Définition

Un torseur
 est un ensemble de deux champs de vecteurs :
est un ensemble de deux champs de vecteurs :
le premier est uniforme (indépendant du point considéré). On le note
 et il est appelé résultante du torseur ;
et il est appelé résultante du torseur ;
le second dépend du point où est exprimé le torseur. Si l'on exprime le torseur en un point A, il se note
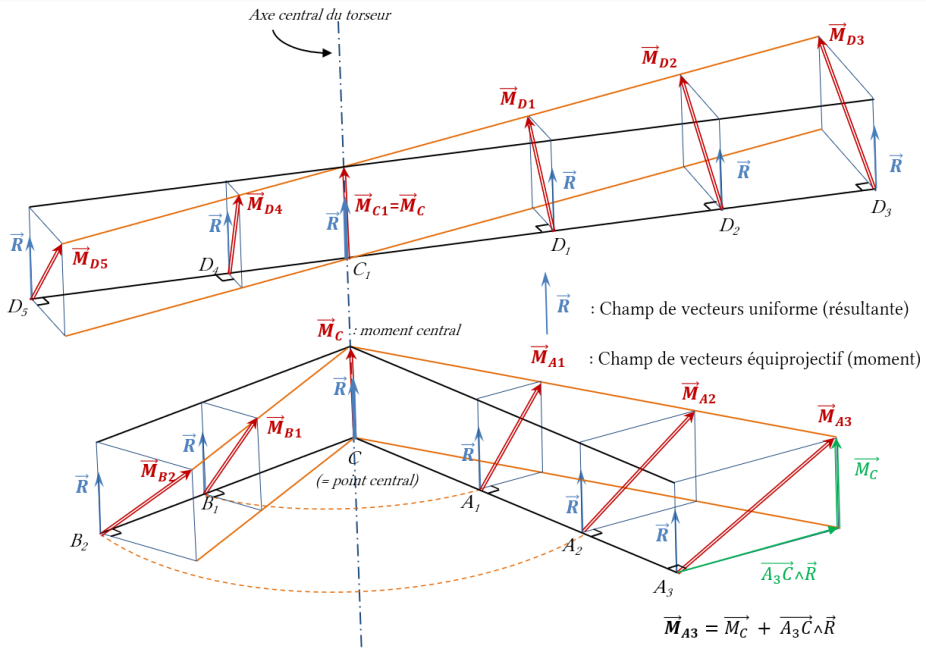
 et il est appelé moment en A du torseur. Le moment d'un torseur est un champ de vecteur équiprojectif. En ce sens, il vérifie la relation suivante appelée formule de Varignon ou formule de changement de point :
et il est appelé moment en A du torseur. Le moment d'un torseur est un champ de vecteur équiprojectif. En ce sens, il vérifie la relation suivante appelée formule de Varignon ou formule de changement de point :
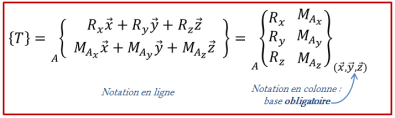
Lorsqu'elles sont connues, il est possible d'exprimer un torseur en fonction des composantes des vecteurs résultante et moment en A :
Illustration
Exemple :
En mécanique du solide, le torseur est un outil de modélisation très utilisé. On rencontre ainsi :
le torseur cinématique pour modéliser les mouvements d'un solide par rapport à un autre ;
le torseur des actions mécaniques pour modéliser les actions mécaniques transmissibles à un solide ;
le torseur cinétique utilisé pour déterminer l'énergie cinétique d'un solide ou encore pour calculer le torseur dynamique modélisant les effets de l'inertie d'un solide ;
le torseur de cohésion pour modéliser les actions intérieures dans le cadre d'un solide déformable.




